Bonsoir,
Il y avait déjà pas mal d'informations ici :
http://www.f3news.fr/t1063-effort-sur-servos-avec-rds - ced_toulouse a écrit:
- pour l'histoire de l'expo inverse, ce n'est pas lié a la vitesse du servo, mais au deplacement qui n'est pas lineaire avec des bras de servo (sauf si longueur bras de servo= longueur guignol, et angle au neutre est le meme), alors qu'il est lineaire sur le RDS.
Je détaille un peu plus la réponse de Cédric.
Pour les commandes classiques, c'est le rapport entre le bras de levier du servo et celui du guignol qui va fixer le comportement.
La relation est du type : Angle_gouverne = ASIN ( Bras_de_levier_servo / Bras_de_levier_gouverne SIN (Angle_servo) )
Effectivement, si les bras de levier sont identique, alors la relation est linéaire.
Dans le cas où le bras de levier du servo < bras de levier gouverne, alors on a une courbe qui s'aplatit (comme si on avait mis de l'exponentiel négatif).
Dans le cas où le bras de levier du servo > bras de levier gouverne, alors on a une courbe qui se cambre (comme si on avait mis de l'exponentiel positif).
Enfin, en décalant le neutre du servo, on peut rendre dissymétrique le comportement. C'est le fameux différentiel mécanique.
En images :
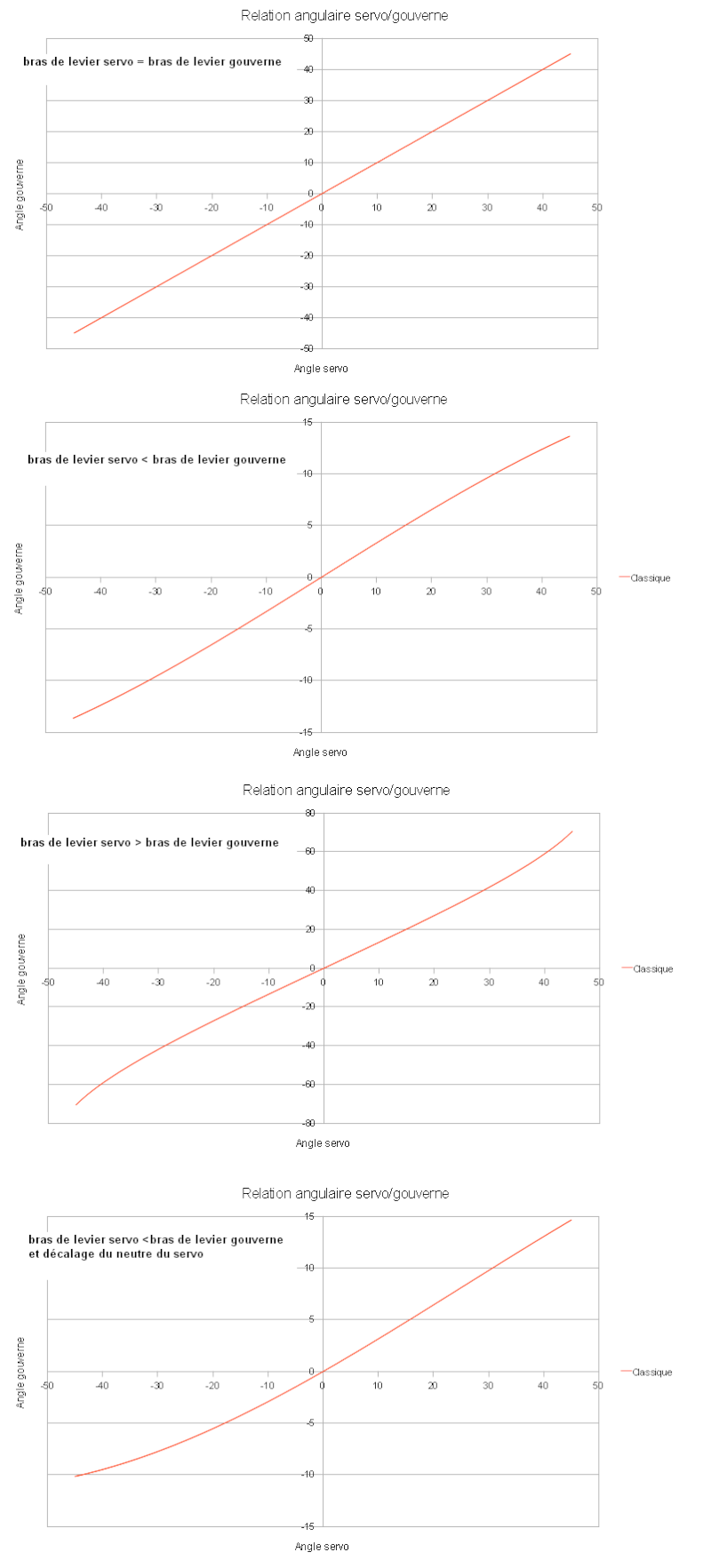
On retrouve bien le fait que lorsque l'on a choisit un bras de levier de servo plus petit que le bras de levier de la gouverne (cas général), ceci conduit à un courbe de réponse nécessitant un peu d'exponentiel positif pour retrouver quelque chose de plus linéaire.
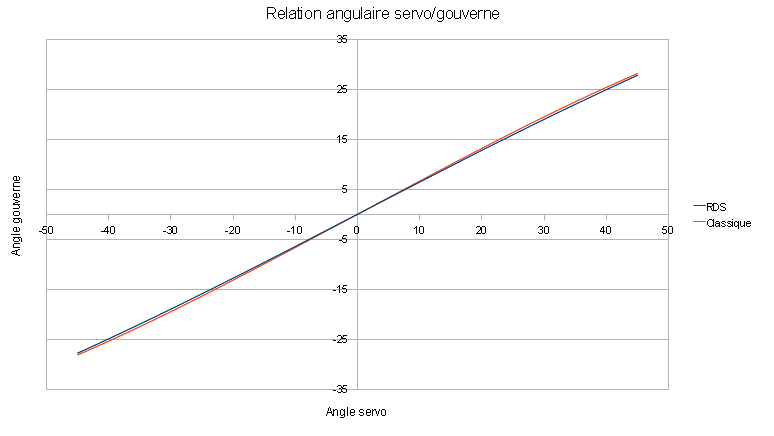
Pour les commandes RDS, ce sont uniquement l'angle entre l'axe du servo et la charnière (noté Lambda) et l'anle de pliage du "doigt" (noté Epsilon) qui influent sur la relation.
La relation est du type : Angle_gouverne = ATAN[ (TAN(Epsilon) SIN(Angle_servo) ) / (SIN(Lambda)+TAN(Epsilon) COS(Lambda) COS(Angle_servo) ) ]
Les courbes obtenues sont assez rectiligne, mais ce n'est pas tout à fait linéaire.

On ne peut pas faire de différentiel mécanique avec un système RDS tel qu'il existe aujourd'hui, mais les radios modernes font ça très bien en général!
Les principaux reproches fait au système RDS sont principalement un manque de débattement ou de vitesse de réponse.
En réalité, il est tout à fait possible de faire une commande RDS qui soit mécaniquement similaire à la commande classique en terme de débattement et de vitesse.
Pour cela il faut simplement bien choisir les angles Epsilon et Lambda pour que l'amplitude de débattement soit bonne.
Bonne

JC








